Recreating bullet time with a Raspberry Pi Camera rig
“Ben the Intern” (his real name is just “Ben”) was double dared by the camera team to recreate the camera rig responsible for the ground-breaking “bullet time” special effects in The Matrix using Raspberry Pi hardware. Then I triple dared him to write a story about how it went. This is that story.

I’ve had a great time as an intern at Raspberry Pi. Over the last few weeks, I’ve worked with the camera team getting hands-on experience with everything that makes our cameras work. From adding new tools for libcamera-apps, to playing in the lab calibrating cameras, I’ve seen way more of the camera world than I ever dreamed. As a little treat, the engineers gave me a fun project to work on: recreate the bullet time effect from the movie “The Matrix”. I downloaded some documentation and got started.
Synchronised Captures



When the High Quality Camera or the Global Shutter Camera start capturing a frame, they output a tiny pulse on the board’s XVS pad. I carefully soldered some wires to both boards and tweaked the driver software. After playing with pull-up resistors while watching the pulses on an oscilloscope, I finally got both cameras to capture frames at exactly the same time. The following GIF shows what both cameras captured, and the setup I used to capture the video.
External triggering


Having achieved this first goal, the team moved the posts and gave me another challenge. The engineers wanted me to test external triggers to see if I could capture a frame through an external source like Raspberry Pi Pico. Pulsing the XTR pin low on the Global Shutter Camera for a given time caused the camera to capture a frame with that given exposure time. This allows for all kinds of synchronisation fun.
After rebuilding the Linux kernel again — a rather tedious process — and playing with some drivers, I managed to get this to work. We could use the Raspberry Pi Pico to send a pulse, and the camera would respond. The final piece of the puzzle was writing a bit of code to trigger a signal from the Pico with the right frame rate and exposure time. Finally, we were ready to start capturing!
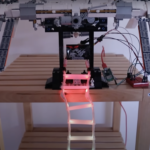
3D-printed rig


Our Maker in Residence, Toby, created a 3D-model of the camera rig. You can see close ups of this rig in the previous photos. It took quite a bit of work to get each camera aligned and focused on exactly the same point, but once that was done it was time to power up the rig.
I had each Raspberry Pi record a ten second video, the frames from which could then be stitched together using FFmpeg. This gave us our final result.

If you’re interested in trying this out yourself, check out the Raspberry Pi Camera documentation. The sections on synchronous captures and triggering provide more detailed guidance.
And finally, here’s the result! I managed to capture a Pi that seems to (almost) float in mid-air!







8 comments
Joel
Wow! That’s so cool! Great work :)
Robin
Awesome! I would like to take a picture with 4 cameras at the exact same time. Will Ben be putting together a technical doc that walks us through how to do that?
Naushir Patuck
A link to all documentation related to frame synchronisation and external trigger can be found towards the end of the blog post.
Siribiriz
Really cool project!!!
Christoff Smith
Great work Ben, impressive.
I’m curious about the term intern (see the comment below from Lucy). Does Pi Towers employ interns or not?
https://forums.raspberrypi.com/viewtopic.php?t=348371
lucyhattersley wrote: ↑
Mon Mar 06, 2023 4:08 pm
For some back story, we don’t have interns on The MagPi (we pay people fairly for work – it’s something we’re quite determined about).
I have found the term “intern” carries baggage and can conjure up as much disdain and contempt as using “senior” does.
I don’t personally consider “interns” to mean only those working for free or being exploited; I see suggesting an intern be brought in more as believing a task appears simple enough that it would be well suited to a student or other work experience placement to undertake, not that they shouldn’t be paid fairly for their work.
I don’t like companies looking to employ unpaid or low paid interns as a way of saving money but I don’t oppose companies taking on people who offer their services for free to gain experience.
Raspberry Pi Staff Liz Upton
We do in the engineering part of the organisation: and we pay them the same as we pay our engineers. Culturally, it’s rather different from the publishing industry.
In publishing, which is the part of the company Lucy works for, we don’t have interns. The publishing industry has BAGGAGE around internships, which are often unpaid – I worked in publishing for years pre-Raspberry-Pi, and what’s understood as an “internship” in publishing is not a great deal for young people. (Putting it mildly.) So we don’t do that here in our publishing business: instead we employ young people fairly for their work, and we offer them proper contracts.
Zilinex
Nice job. Would be informative to tell us about what kernel configs you used, and what modules were missing in the first place. As i can see, I don’t see any wiring from GPIO in RPi modules to each other or any other device. So a RP pico is doing the timing and RPis save the captured frames?
you could potentially achieve a higher frame rate by combining multiple cameras close to each other (almost same angle) for faster purposes.
TJ Talluto
Hi – can you please provide a wiring diagram illustrating how the pico is daisy chained to the cameras for the scenario of simultaneous captures from multiple cameras? It’s difficult to see where the wires are connected in the photos. I’m assuming a single pico was triggering all the cameras and the cameras were acting as repeaters to send the trigger signal downstream to the next camera. Thank you.
Comments are closed