Watch NE-5, the Raspberry Pi-powered robot, on TV
Maker Keegan Neave turned his Johnny 5 homage into a TV star. Meet NE-5, the Raspberry Pi-powered robot.
Keegan’s official title is Creative Technologist, but it’s open source robotics he loves the most. The BBC agrees that he’s pretty good at it — so much so that they’ve just featured his builds on the brand new show David & Jay’s Touring Toolshed.

The premise of the show sees the hosts “park up their toolshed at the UK’s air shows, steam rallies, county fairs and vintage festivals, to meet some of the UK’s most talented crafters, makers and tinkerers – as well as people who could use a little help!” Keegan featured on episode 6 of the program, showcasing his his passion project: a robot called NE-5.
Mini charmer
NE-5 is basically an homage to Johnny Five, the robot in the film Short Circuit, except it stands at nought but two feet tall. The “real” Johnny famously stood at six feet tall and charmed the absolute pants off cinema goers in the mid-1980s.

Keegan’s more compact version of one of film’s favourite robots sits on a bespoke four-wheeled base, which is a different look to the original Johnny 5. Earlier iterations did feature two additional wheels above the rear wheels, and the six wheels pulled rolling tracks (like a military tank has) to move the robot forward. Keegan ditched this idea in favour of the simpler and more reliable four-wheel setup we see today.
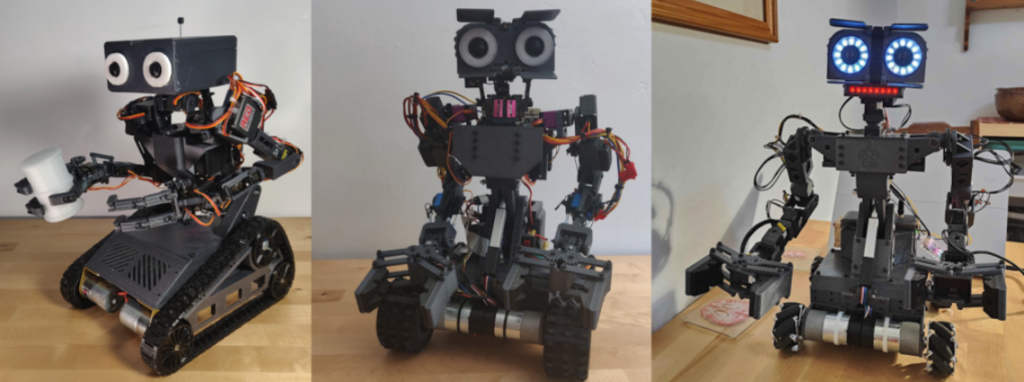
NE-5 has been a long time coming. It’s the third iteration in a line of robots Keegan has been tweaking to perfection for a few years now. Read this to track the journey from the first to the final robot design.
Hardware
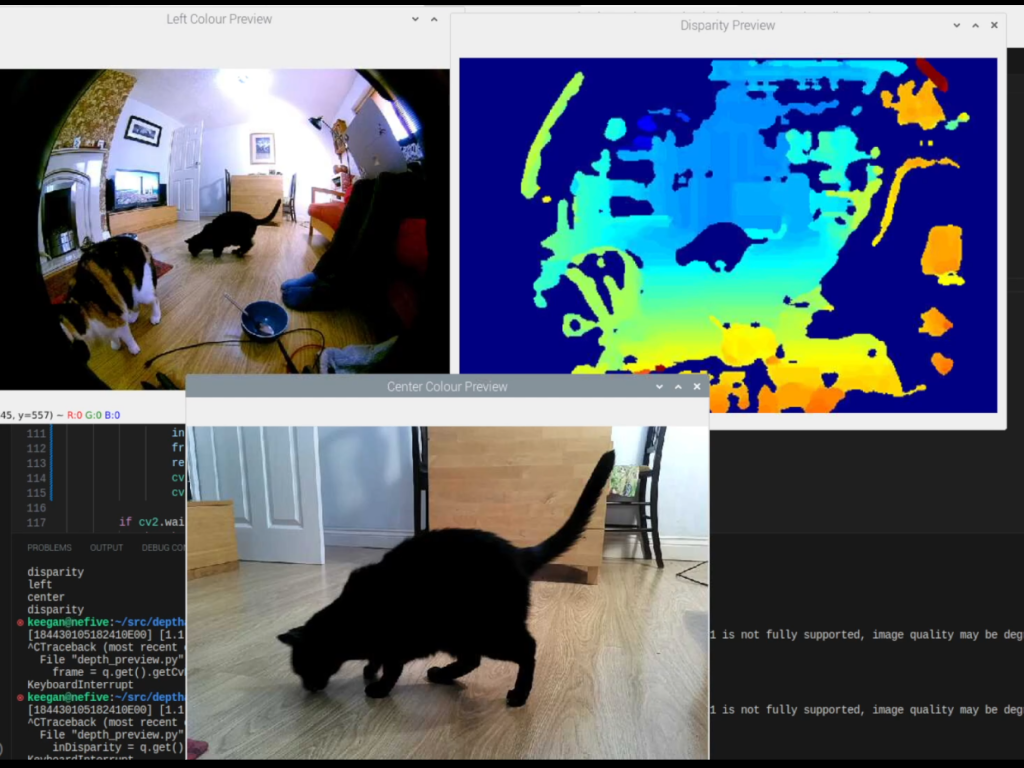
Where previously a StereoPi was responsible for control and vision, the latest and newly TV-famous version of the robot uses a Luxonis FFC-3P, which allows for up to three cameras to be connected at once. Two of the three cameras in the latest version of the robot are AR0234 sensors with 110-degree wide angle lenses. The third is an IMX378 with auto-focus but a much narrower field of view, useful for getting a closer look at objects when the robot is stationary. The three cameras can be used simultaneously thanks to the Luxonis.
Motor and servo control used to live in the robot’s head, but all that was moved to an enclosure on NE-5’s much roomier “caboose”, as Keegan puts it in his build notes. A RedBoard+ robotics add-on board sits on a Raspberry Pi Zero and runs the multitude of servos, motors, and NeoPixels which bring NE-5 to life.
Raspberry Pi 5 upgrade
For the TV star version of the robot, Keegan replaced the Raspberry Pi Zero with a Raspberry Pi 4, but he has since upgraded it again to a Raspberry Pi 5. He’s still getting to grips with it as there are a few quirks with the various code libraries that NE-5 pulls from, but it’s coming along.
Keegan hopes to release NE-5 as a fully fledged product for sale by the end of the year, so stay tuned to neave.engineering for news.





2 comments
Keegan Neave
Thanks for sharing! If anyone has any questions let me know, otherwise head to my website link for more info on recent upgrades. :)
Eric Olson
Was the greater processing power of the Pi 5 the reason you are replacing the Pi 4? If so, what will the additional processing power be used for?
Comments are closed