Exoskeleton walking aid | The MagPi #126
This groundbreaking device aids walking while understanding that people move in different ways, as David Crookes explains in the latest issue of The MagPi.
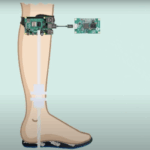
Raspberry Pi always has the potential to put a spring in our step but, in the case of this project, it’s doing so in a literal sense. A research group at Stanford University has designed a robotic exoskeleton – an external frame that aims to support the body – with the aim of helping people with mobility impairments to walk and run more quickly. It’s worn over the lower leg like a boot, and it has the potential to be revolutionary.

According to the team, exoskeletons of this nature, while proving effective in reducing the energy required to walk, tend to be expensive. They are also usually tethered which, as you can imagine, would be restrictive. The Stanford Biomechatronics Laboratory’s exoskeleton, however, is neither of those things. And much of that is down to the incorporation of a Raspberry Pi 4 computer linked up to a host of sensors, a motor, and a motor driver.

“We selected Raspberry Pi specifically because it is low-cost, and quite capable for integrating many sensors and running multiple threads of code at the same time,” Patrick Slade tells The MagPi. “The Raspberry Pi is also really nice because we can write code in Python, which is much easier to work with when validating a complex device than typical microcontrollers that might run Arduino or C.”
Gathering momentum
Patrick worked on the exoskeleton as a PhD student and he’s now a postdoctoral scholar at Stanford. The project is led by associate professor of mechanical engineering Steve Collins and the work has, so far, performed well in extensive testing. The key to this exoskeleton is that it’s personalised to suit different ways that humans walk. “It resulted in exceptional improvements in walking speed and energy economy,” Steve says.

For many years, the team has been using exoskeleton emulators to train a machine-learning-based model. It has involved volunteers being hooked up to expensive devices so that motion and energy expenditure data can be collected and this has enabled the boot to work out the best way of assisting an individual.

With the untethered exoskeleton, a wearer simply needs to walk around for about an hour in order for the system to figure out a pattern, then adjust and create a suitable aid. To do this, Raspberry Pi 4 reads sensor data and performs real-time control and optimisation at 200Hz, the team says, and the benefits can be felt within the first 15 minutes.
Moving forward
So far, the results are heading in the right direction. People are not only walking nine percent faster, they are expending 17 percent less energy too. The researchers say the difference is equivalent to “taking off a 30-pound backpack.” What’s more, it’s a greater improvement to walking than any other exoskeleton made before.

As you can imagine, this is sure to have major benefits for older people and those who are experiencing mobility decline. “It will allow people to lead more active, independent, and meaningful lives,” says Patrick. Of course, much more work is needed and, to bring it to market, the research group will be seeking commercial partners, but the exoskeleton could soon be working alongside traditional aids such as wheelchairs and walkers at some point in the near future.
The MagPi #126 out NOW!
You can grab the brand-new issue right now from Tesco, Sainsbury’s, Asda, WHSmith, and other newsagents, including the Raspberry Pi Store in Cambridge. You can also get it via our app on Android or iOS. And there’s a free PDF you can download too.

You can also subscribe to the print version of The MagPi. Not only do we deliver it globally, but people who sign up to the twelve-month print subscription get a FREE Raspberry Pi Zero Pico W!




1 comment
Daniël
Wow. Such an amazing project! Incredible a RaspberryPi can help! It makes me want to participate!
Comments are closed