Zippy the Raspberry Pi Zero-powered mini Mars Rover
Maker Mellow was inspired by watching the progress of NASA’s Perseverance Mars rover and wanted in on the interplanetary robot scene. Their first idea was to build a scale version of Perseverance, but when their partner stepped in to suggest that starting smaller might be a little easier, Zippy was born.
Hardware
ProtoTank (a bolt-together modular tank-style robotics platform)
Zippy’s basic parts haven’t changed much through its three iterations. You can follow the journey of Zippy 1.0 through 3.0 on Mellow’s website. You’ll see that some additional hardware was required when Mellow made some improvements.
Baby Zippy
The first version of Mellow’s mini Mars rover was just a motor on a 3D-printed body, controlled by plugging in wires to the battery. But Mellow was desperate to level up their robot and build something that could be controlled by an Xbox controller. They reached that goal with Zippy 2.0 and can drive the mini Mars rover remotely via Bluetooth. However, the range is quite tight, so slow runners need not apply for the job of pilot.
Zippy 3.0 comes complete with a DJI Osmo Action camera to capture its adventures.
What surfaces can Zippy ride on?
Our favourite part of Mellow’s original project post is the list rating how good Zippy is at navigating various types of terrain (some of which are showcased in the video up top):
Sand – NO it gets stuck in the wheels
Big rocks – NO the robot is too low to the ground and gets stuck
Pebbles – with determination
Grass – only very short grass
Human bodies – surprisingly well
Carpets – Zippy loves carpets
Flat terrain – definitely
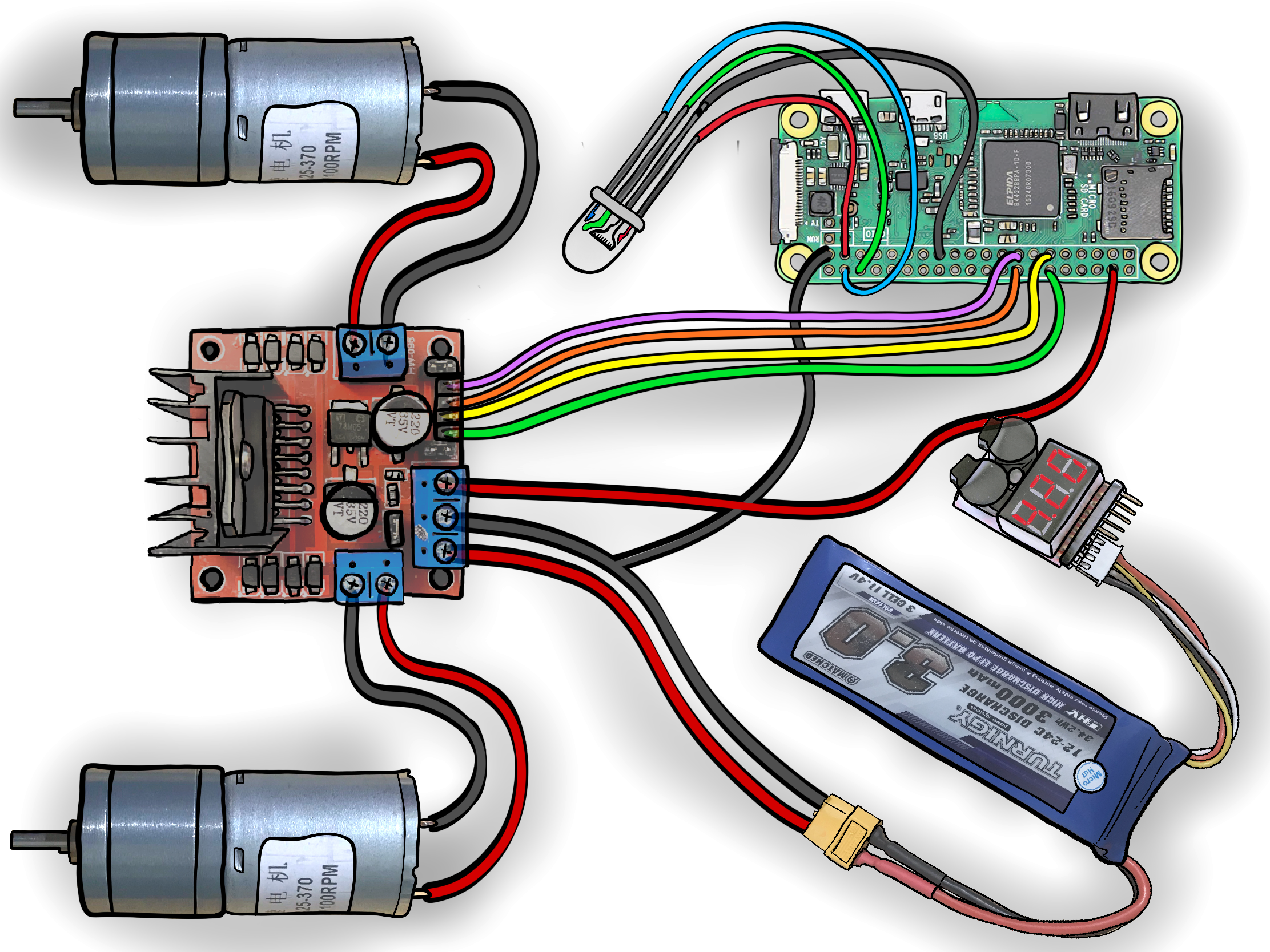
Here’s all the code you need to build your own mini Mars rover.
Follow the real thing on Mars
Keep up with NASA’s Perseverance Mars rover on Twitter. Perseverance spent its summer drilling into rocks, and has photos to prove it.



1 comment
GURUVARAJA GANESAN
Excellent project for try on motors with a scheme
Comments are closed