Raspberry Pi underwater camera drone | The MagPi 80
Never let it be said that some makers won’t jump in at the deep end for their ambitious experiments with the Raspberry Pi. When Ievgenii Tkachenko fancied a challenge, he sought to go where few had gone before by creating an underwater drone, successfully producing a working prototype that he’s now hard at work refining.

Inspired by watching inventors on the Discovery Channel, Ievgenii has learned much from his endeavour. “For me it was a significant engineering challenge,” he says, and while he has ended up submerging himself within a process of trial-and-error, the results so far have been impressive.
Pi dive
The project began with a loose plan in Ievgenii’s head. “I knew what I should have in the project as a minimum: motions, lights, camera, and a gyroscope inside the device and smartphone control outside,” he explains. “Pretty simple, but I didn’t have a clue what equipment I would be able to use for the drone, and I was limited by finances.”
Bearing that in mind, one of his first moves was to choose a Raspberry Pi 3B, which he says was perfect for controlling the motors, diodes, and gyroscope while sending video streams from a camera and receiving commands from a control device.
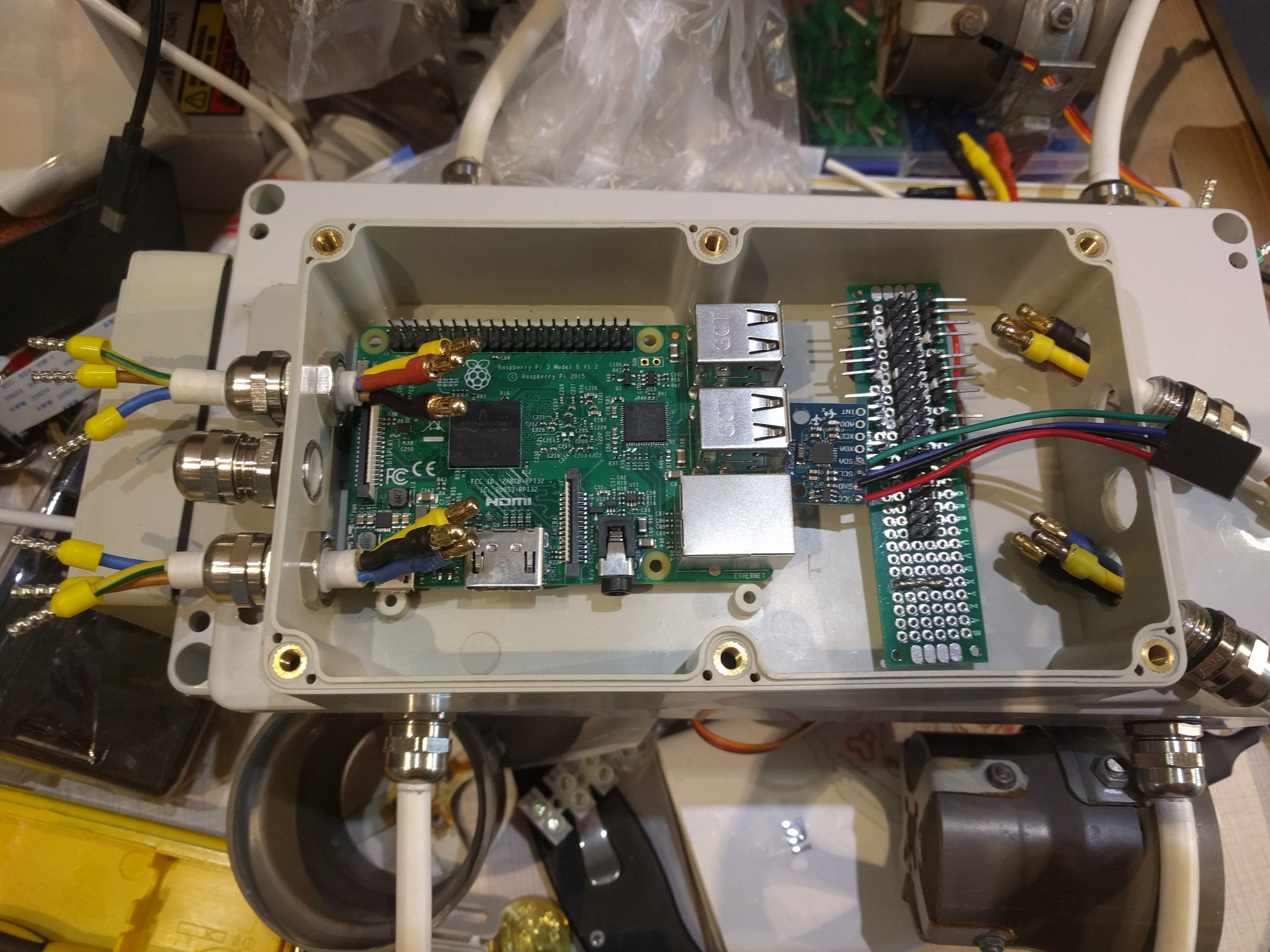
The Raspberry Pi 3 sits in the housing and connects to a LiPo battery that also powers the LEDs and motors
“I was really surprised that this small board has a fully functional UNIX-based OS and that software like the Node.js server can be easily installed,” he tells us. “It has control input and output pins and there are a lot of libraries. With an Ethernet port and wireless LAN and a camera, it just felt plug-and-play. I couldn’t find a better solution.”

The LEDs are attached to radiators to prevent overheating, and a pulse driver is used for flashlight control
Working with a friend, Ievgenii sought to create suitable housing for the components, which included a twin twisted-pair wire suitable for transferring data underwater, an electric motor, an electronic speed control, an LED together with a pulse driver, and a battery. Four motors were attached to the outside of the housing, and efforts were made to ensure it was waterproof. Tests in a bath and out on a lake were conducted.
Streaming video
With a WiFi router on the shore connected to the Raspberry Pi via RJ45 connectors and an Ethernet cable, Ievgenii developed an Android application to connect to the Raspberry Pi by address and port (“as an Android developer, I’m used to working with the platform”). This also allowed movement to be controlled via the touchscreen, although he says a gamepad for Android can also be used. When it’s up and running, the Pi streams a video from the camera to the app — “live video streaming is not simple, and I spent a lot of time on the solution” — but the wired connection means the drone can only currently travel as far as the cable length allows.

The camera was placed in this transparent waterproof case attached to the front of the waterproof housing
In that sense, it’s not perfect. “It’s also hard to handle the drone, and it needs to be enhanced with an additional controls board and a few more electromotors for smooth movement,” Ievgenii admits. But as well as wanting to base the project on fast and reliable C++ code and make use of a USB 4K camera, he can see the future potential and he feels it will swim rather than sink.
“Similar drones are used for boat inspections, and they can also be used by rescue squads or for scientific purposes,” he points out. “They can be used to discover a vast marine world without training and risks too. In fact, now that I understand the Raspberry Pi, I know I can create almost anything, from a radio electronic toy car to a smart home.”
The MagPi magazine
This article was lovingly borrowed from the latest issue of The MagPi magazine. Pick up your copy of issue 80 from your local stockist, online, or by downloading the free PDF.
Subscribers to The MagPi also get a rather delightful subscription gift!






3 comments
David
He should run the Ethernet cable up to a floating relay which could transmit to shore over WiFi. Then his only restriction would be the distance of the WiFi signal.
To go a bit further he could run a generator on the floating relay and have the ability to stay submerged for very long periods of time.
michel HIRVOIS
Bonjour
I am building myself a ROV based on a Raspberry PI3 raspbian stretch. For the moment I am managing brushless motors through PWM pins and I am now installing and testing PI camera from uctronics. My current step is to set up a video-streaming environment … If you have some good recommandation for me , that will be great : mainly what software you have used uv4l, mjpegsteamer, vlc…
On the other hand, what type of brusless motors are you using ?
I wish you great fun with your project
Michel (from french riviera)
John Motch
Hi, I’m developing a PiZero submersible connected to an overhead electric powered boat with on-board Raspberry pi 3+. The sub streams live video to boat then back to shore via Wifi, also testing a radio link to the shore for video transmission. I leave on the coast in Devon, England and I’m using the project to capture underwater action around a near-shore environment. The camera and boat is controlled by a on-shore Android tablet.
Regards
John
Comments are closed